
IDE/Honours Project 3: 3D Scanners
Create a 3D scanner which is able to scan an object with one click.
This project was done for the Mechatronics course in conjunction with its Honours module. During the bachelor Honours modules would expand and deepen the knowledge of the chosen courses. This course was one of the chosen modules. Both assignments for the regular course as well as the Honours module was to create a 3D scanner. This allowed for parallel development of the products and creating room for experminentation on multiple fronts. These projects furthered the mechatronics knowledge in integrating mechanical, electrical and programming knowledge.
Regular Course Project
Honours Module Project

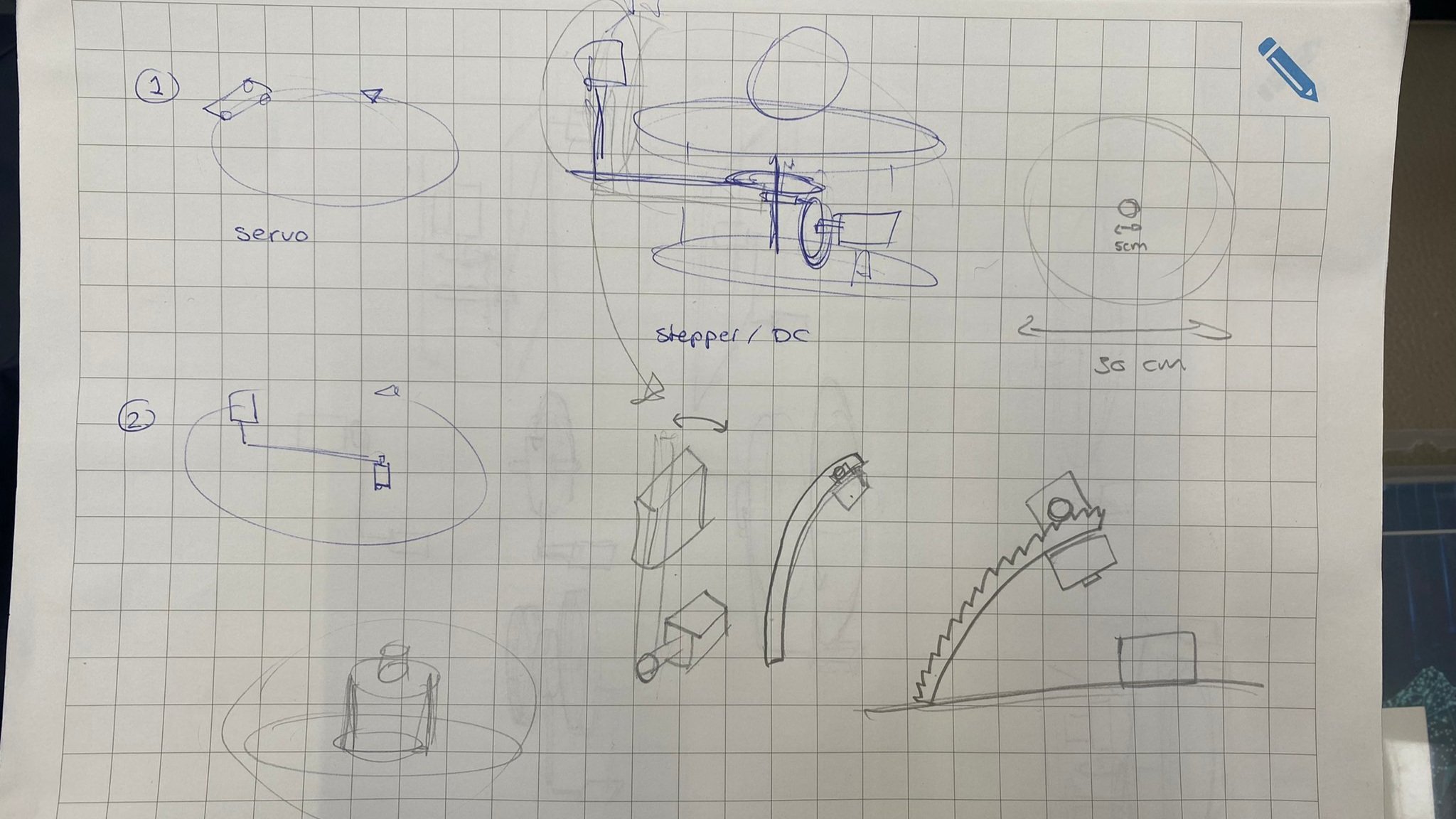
The 3D scanner started with brainstorming the mechanism and researching how objects can be 3D scanned. It would be a multi-level video 3D scanner using a phone as capture device.
The Honours project is based upon using a Raspberry Pi with an integrated Pi camera. This is a different starting point and a more integrated approach to the 3D scanner architecture.

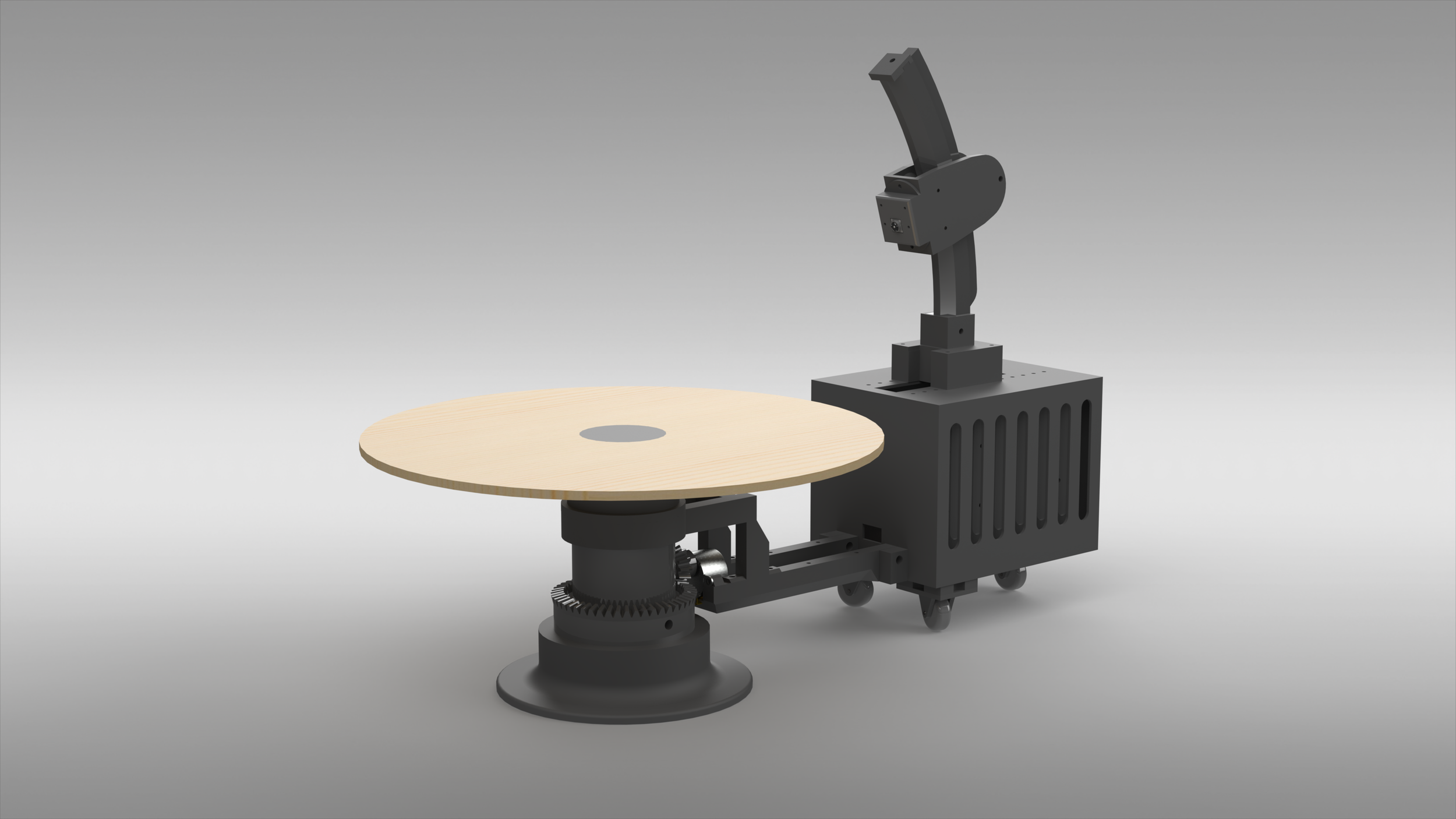
The first design, made in SolidWorks, is based on using a platform containing an encoder disk. This platform houses the item to be scanned. The electronics and mechanisms to carry and lift the phone is located on a carriage which is wheel driven by a DC motor. The phone was lifted by a stepper motor in a pulley-carriage setup.
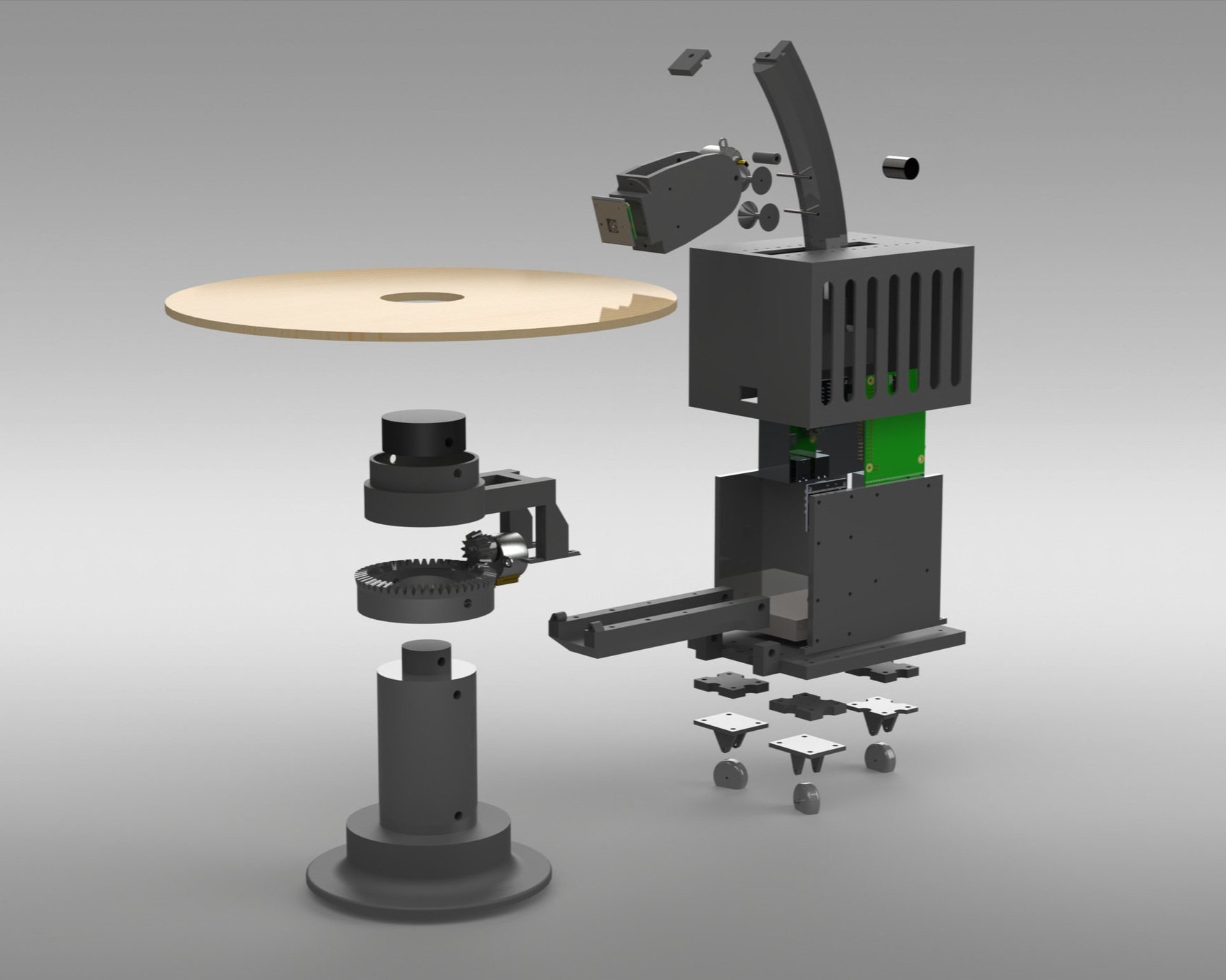
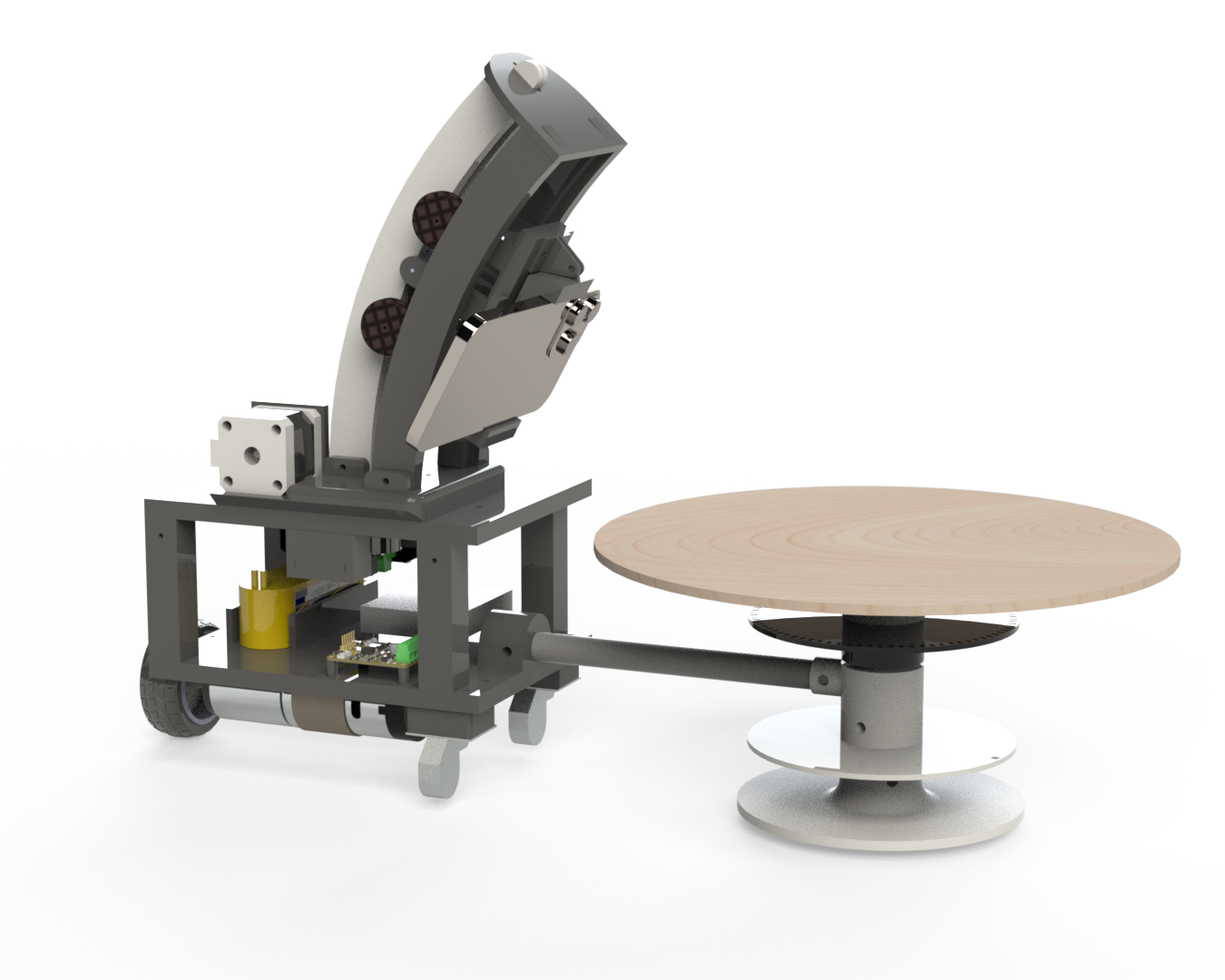
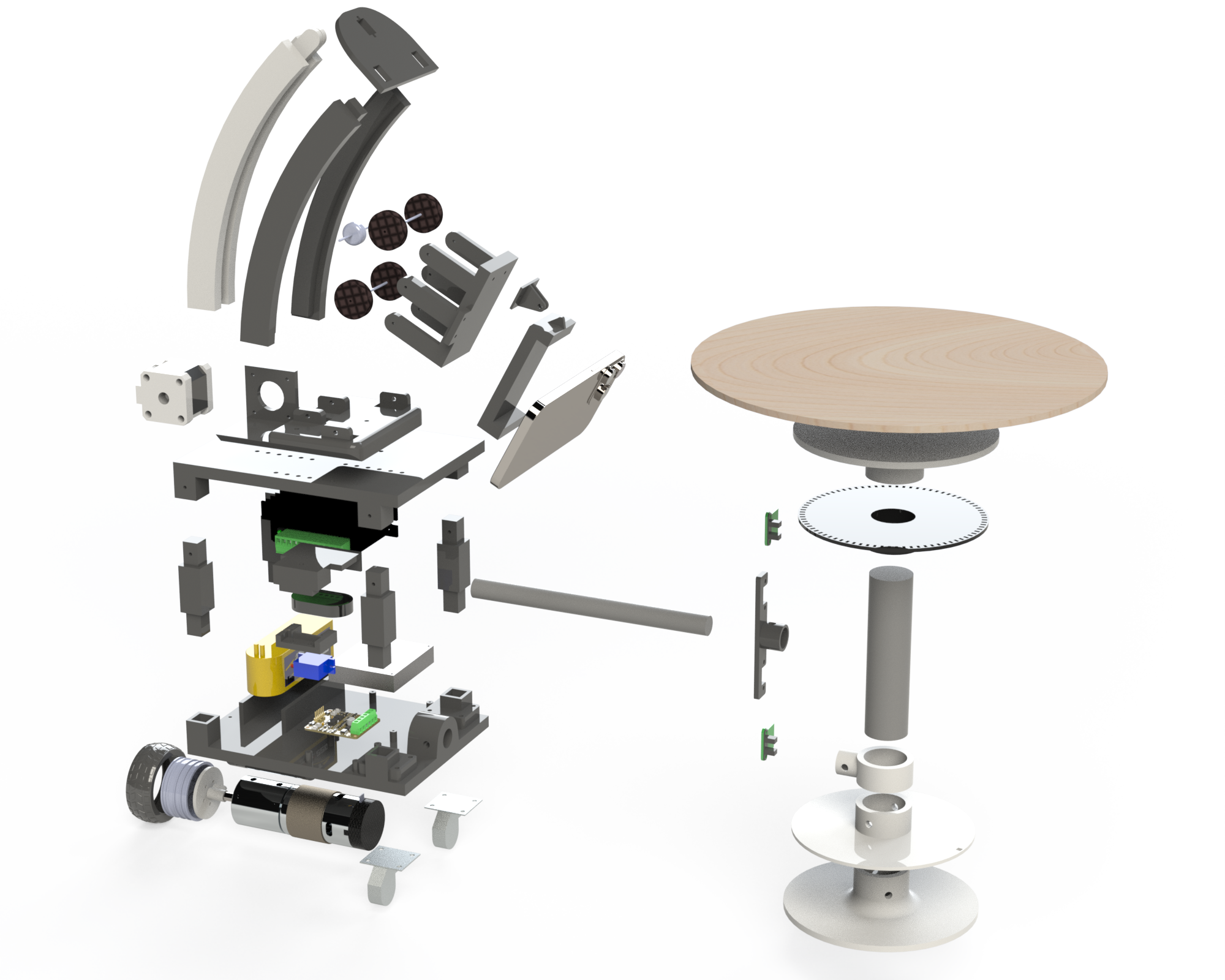
The 3D scanner build for the Honours module would be based upon the same principle as a carriage turning around a platform. However, in the second design, a 3D printed gear would be combined with stepper motors for increased accuracy and precision. The second design uses a motorized gear carriage to lift the integrated camera.

The first design was put together using given parts. This meant that the integration of the different components went smoothly. However, integrating the phone into this system proved a challenge. First, a touchscreen tapper was used, but due to the need of a ground this was unfeasible. A solution was found in a Bluetooth clicker operated by a servo motor.

The second design required a vastly different approach to integrating the functionalities. As a Raspberry Pi was used, a more integral understanding was needed of the architecture to build the system. However, this allowed for a more complete integration between different systems.
Result Comparison
Both 3D scanners were able to fulfill their purpose and each had their advantages and disadvantages. See the videos below for demonstrations.
The first design was fast and powerful. This allowed the scanner to scan objects quickly as a video was used to capture the object. Due to the powerful motors and heavy components, the carriage is heavy and battery drain fast.

The Honours 3D scanner was more lightweight than the first design and ran only on a 5V powerbank. However, the scanning is slow due to the scanner pausing each time to take a picture as well as a low amount of torque. This video is sped up 5x.
